ロボットの自律走行と遠隔管理を実現する「建設ロボットプラットフォーム」を開発 BIMデータをロボットの3次元地図情報として活用し、生産性を向上
2020年2月14日
株式会社竹中工務店
竹中工務店(社長:佐々木正人)は、ロボットが自律走行するための経路・範囲シミュレーションおよび遠隔操作・監視を可能とする、BIM※1データを活用した基盤システム「建設ロボットプラットフォーム」を開発しました。本システムはクラウド上で稼働するもので、施工中の建物内におけるロボット運用に寄与します。本システムは、ブレインズテクノロジー株式会社に委託し開発を進めました。
従来、施工中の建物内での建設ロボット運用においては、カラーコーンをターゲットとして作業範囲を指定する必要があることや、ロボットや機械の稼働台数増加、機能の高度化に伴う保守・運用に関する管理業務が多様化する等、各管理業務の効率化が喫緊の課題でした。
「建設ロボットプラットフォーム」は、搬送ルートの指定をしていた作業を不要とするだけでなく、カラーコーンが見える範囲でしか使用できなかったロボットの作業範囲も大幅に拡大できるシステムです。さらに、台数の増える建設ロボットの稼働状況を、ロボットを保有するレンタル会社とともに管理することで、保守運用業務の効率化が期待できます。
当社は、2020年6月まで試適用を繰り返し、2020年度中に本格的に本システムを展開していきます。
なお、本開発は、建設産業の生産性および魅力向上に向けたロボットやIoTの活用を目的に、鹿島建設との技術連携の一環として行っている「場内搬送管理システム・建設ロボットプラットフォーム」開発のうち、竹中工務店が担っている開発項目です。
- ※1Building Information Modelingの略。コンピュータ上に作成した3次元の建物モデルに、仕上げ、コスト、管理情報等の属性データを追加したものを、設計から施工、維持管理まであらゆる工程で活用する概念あるいは業務フロー
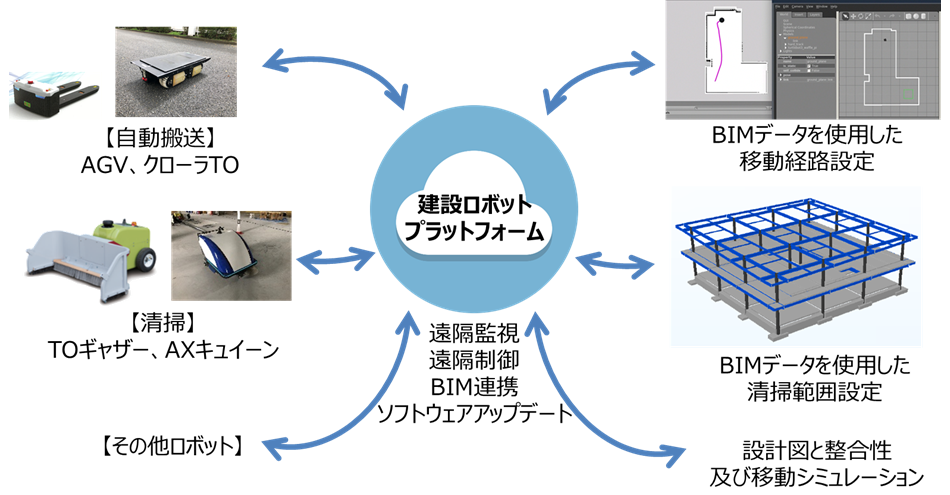
「建設ロボットプラットフォーム」の概要
働き方改革が社会的課題となる中、様々なサービス領域でロボットに期待される役割が増えてきています。建設業界においても施工段階における本格的な清掃ロボット、建設資材の自動搬送、日常の品質管理記録等、ロボットの適用領域が拡大してきています。
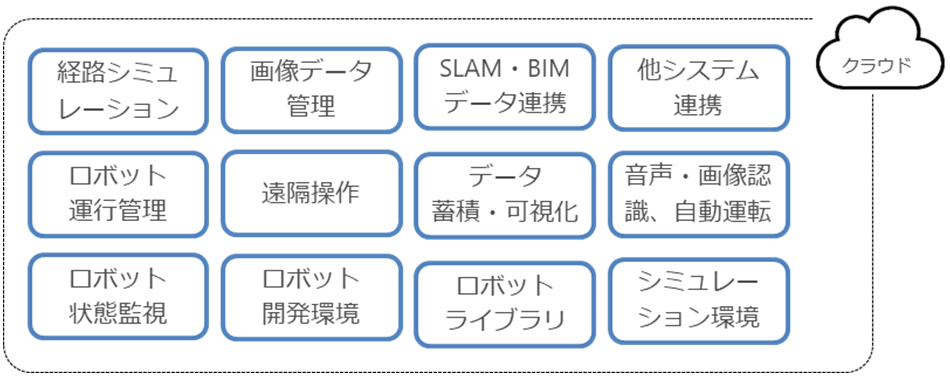
一方で、ロボットや機械の稼働台数増加、機能の高度化に伴い、保守・運用に関する管理業務も多様化しています。今後、ロボットを効果的に活用するにはロボットの自律的な稼働を実現させること、安全稼働状況の監視および異常時に適切に制御できることが重要となってきます。これらの課題を踏まえ、クラウド上で稼働する本システムでは、主に以下のことが可能となります。
BIMデータ連携による自律走行
-
・BIMデータを地図情報としてクラウド上でロボットの移動および動作範囲を設定し、遠隔指示でのロボットの自律走行を可能とする
(一般的に行われているロボット走行のための、現地での事前のティーチングや磁気テープ・2次元コード等による動作範囲指定等の手間を省くとともに、動作範囲の最適化を図る)
遠隔監視とソフトウェア開発の効率化
- ・クラウド上での建設ロボットのバッテリー状態、異常状態の遠隔監視を行う
- ・ロボット制御等の共通ソフトウェアの開発・更新、さらには各種センサー等の先端デジタル技術との複合的な開発・適用による改良のスピード化
