タワークレーン遠隔操作システム「TawaRemo」を開発―大阪に設置したコックピットから名古屋に設置したタワークレーンの操作を実現―
2020年6月16日
株式会社竹中工務店
鹿島建設株式会社
竹中工務店(社長:佐々木正人)と鹿島建設(社長:押味至一)は、アクティオ(社長:小沼直人)、カナモト(社長:金本哲男)と共同で、遠隔でタワークレーンを操作できる「TawaRemo」を開発しました。このほど、大阪に設置した地上の専用コックピットから、名古屋に設置した大型タワークレーンを操作し、材料移動、積み込み・積み下ろし作業等の遠隔操作が可能であることを確認しました。
タワークレーンのオペレータは、作業時にはタワークレーン頂部に設置された運転席まで最大約50mを、梯子を使って昇降する必要があります。また、一旦席に着くと作業開始から終了まで、高所の運転席に1日中拘束されることになります。そのため、オペレータへの身体的負担の軽減や作業環境の改善に対する“働き方改革”に向けた取組みが求められていました。これに対し、当該システムを用いて地上にコックピットを配置すれば、作業事務所や遠隔地のコントロールセンターなどで、場所に捉われずタワークレーンの操作が行えるようになります。また、同一箇所に複数のコックピットを配置できることから、多数の若手オペレータに対して、熟練オペレータ1名による指導教育も行え、熟練から若手への技術伝承ならびに若手の技量向上の一助にもなります。

両社は、2020年9月までに両社作業所において、諸官庁との協議を行いながら試適用を繰り返し、コックピットの増産及びタワークレーンへの本システム搭載を進め、2020年度中に本格的な運用を目指していきます。
併せて、アクティオは、自社保有のタワークレーンに対して当該システムを順次導入し、カナモトは、コックピットおよび通信システムのレンタル運用保守を担当します。
今後、建設業界全体の更なる生産性向上や魅力向上を目指し、4社共同でタワークレーンのみならず様々な工事用機械への適用拡大に向け、本システム」の開発を進めてまいります。
なお、本開発は、竹中工務店と鹿島建設の技術連携の一環として行っている「遠隔操縦システム」の開発項目です。
関連リリース: ロボット施工・IoT分野における技術連携について
タワークレーン遠隔操作システム「TawaRemo」
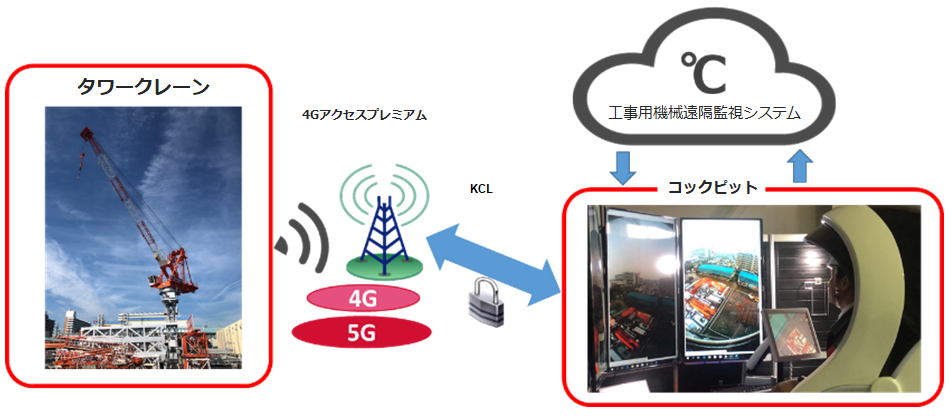
タワークレーンの運転席回りに設置された複数台のカメラによって撮影された映像が、基地局を経由して地上(または遠隔地)にあるコックピットに送信され、モニター画面に映し出されます。また、荷重などの動作信号及び異常信号を閲覧する専用モニターも配置しています。さらに、タワークレーン側に設置されたジャイロセンサーにより、コックピット側で実際のタワークレーンの振動、揺れを体感することもでき、タワークレーンの運転席上での操作と同等の環境を構築しています。
通信システムは、NTTドコモの協力のもと、4Gアクセスプレミアム回線(閉域ネットワーク)による高いセキュリティーが保たれており、安心して操作が行えるよう設計されています。さらなる操作性向上を目指し、5G回線の導入も検討しています。また、カナモトが開発した通信システム「KCL」(Kanamoto Creative Line)を使うことで、セキュリティーの強化と低遅延での操作を可能としています。
4社は、2019年9月から実機での検証を開始し、通信環境、コックピットの仕様変更などの改良改善を実施してきました。2020年1月には、通常の材料の積み込み、積み下ろし作業を遠隔で問題なく実施できるようになっています。
